HEP团队 投稿
量子位 | 公众号 QbitAI
如何让AI像人一样,仅凭少量演示,就能稳健适应复杂多变的真实场景?
美国东北大学和波士顿动力RAI提出了HEP(Hierarchical Equivariant Policy via Frame Transfer)框架,首创“坐标系转移接口”,让机器人学习更高效、泛化更灵活。
总的来说,HEP框架具有以下亮点:
- 极简高效的分层结构
- 高层负责全局目标设定,低层自主在本地坐标下优化动作,显著提升操作的灵活性与效率;
- 空间对称性自然泛化
- 模型自动适应目标平移、旋转等变化,极大降低泛化对数据量的依赖;
- 创新型体素编码器
- 三维视觉信息高效表达,兼顾细节还原与计算速度。
论文已被ICML2025收录。
核心创新
在机器人智能操作领域,数据稀缺和泛化难题长期困扰着AI的落地应用。大多数方法或依赖大量数据,或在环境稍有变化时表现失灵。
而HEP框架使用了一种用于层级策略学习的框架转换接口,该接口使用高级代理的输出作为低级代理的坐标系,能够在保持灵活性的同时提供强大的归纳偏差。
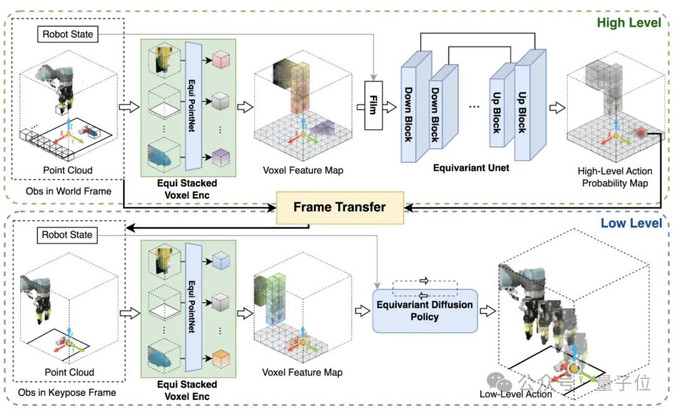
简单地说,HEP 基于两个核心思想:分层策略结构和“坐标系转移接口”,高层策略仅需给出任务的“参考坐标”,低层策略在此基础上自主优化执行细节。
- 高层策略:负责通过预测一个“关键姿态”(即一个目标 3D 平移)来进行全局、长时程规划,该关键姿态作为子目标。
- 低层策略:在以关键姿态为锚点的局部坐标系中生成细粒度的运动轨迹。
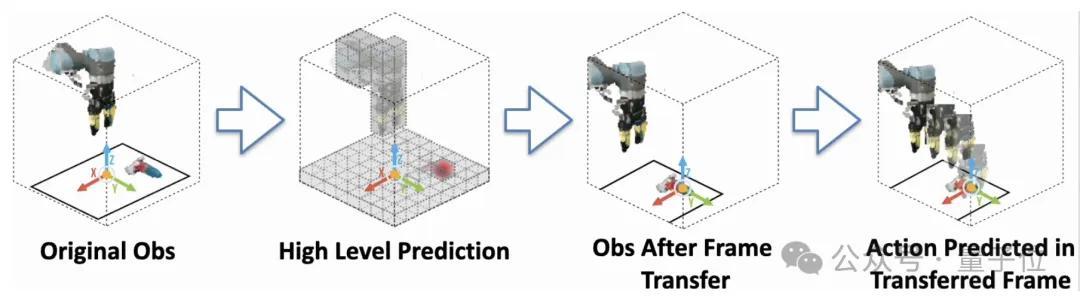
而“坐标系转移接口”具有以下特点:
- 传递泛化能力:高层的泛化能力可以传递到低层。
- 软约束:局部轨迹优化。
- 归纳偏差:自然泛化到新姿态。
这样的设计不仅释放了低层的灵活性,也将高层的泛化能力、抗干扰性自洽地传递到底层,实现了“泛化性与鲁棒性”的一体式提升。
效果展示
为验证HEP框架的有效性,研究团队在RLBench上的30个模拟任务中进行了测试——包括高精度任务、长时程任务和关节物体操作——并在真实机器人上通过3个真实世界操作任务进一步验证。
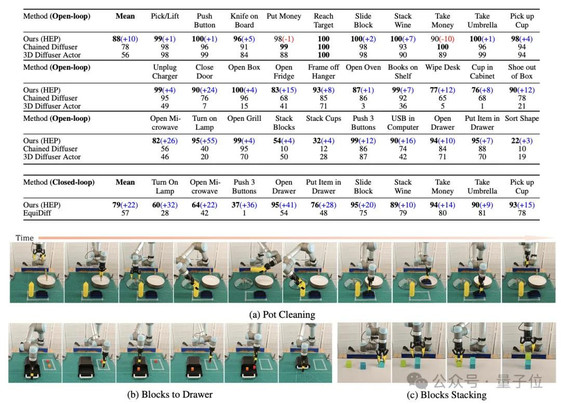
结果显示:
分层策略在复杂长程任务上优势显著
在真实机器人上,HEP分层框架仅用30条演示数据,就学会了包括移锅盖、加清洁剂、擦洗等多步协作的鲁棒“洗锅”任务,明显优于非分层方法。
坐标系转移接口:泛化性与鲁棒性的传递桥梁
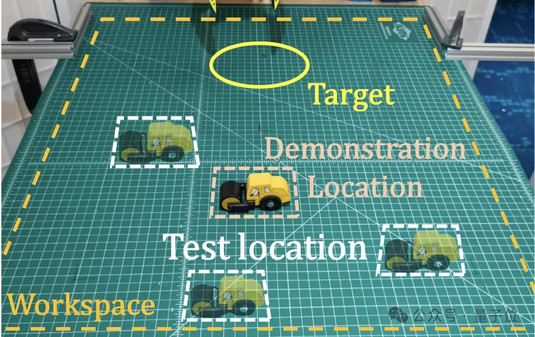
在Pick&Place任务上,HEP仅凭一次演示,低层扩散模型即可实现1-shot泛化学习,显著提升了数据效率。
证明了坐标系转移接口能将高层对空间变化的适应能力无损传递至低层,策略整体更易扩展至新场景。
并且,在环境变化和引入无关物体的扰动测试下,HEP成功率较传统方法提升高达60%。
接口设计带来未来扩展可能
坐标系转移接口对低层策略仅施加软约束,这不仅保证了灵活性,也为未来引入VLM或Cross-embodiment等多模态、跨平台高层策略作为决策规划器提供了天然接口。
一句话结论:坐标系转移接口不仅实现了高层泛化性和鲁棒性的无损传递,还为多模态智能体的开放性集成与泛化部署打开了新路径。
论文地址:https://openreview.net/pdf?id=nAv5ketrHq
项目代码:https://codemasterzhao.github.io/HierEquiPo.github.io/
— 完 —
量子位 QbitAI · 头条号
关注我们,第一时间获知前沿科技动态签约